Two days ago, I gave a seminar talk on Chern‘s proof of the generalized Gauss-Bonnet theorem. Here I record the answer to a question asked by one of my colleague during the talk. Although not directly related to the proof of the generalized Gauss-Bonnet theorem, I think it’s quite interesting itself.
Let me first give some background before stating the question.
Roughly speaking, the idea of proof goes like this: Let’s assume  for simplicity. Usually the curvature form (or more appropriately, the Pfaffian of the curvature form) is not exact, for otherwise the integral of the curvature form on a closed surface is zero. However, Chern observed that the pullback of the curvature form onto the unit sphere bundle
for simplicity. Usually the curvature form (or more appropriately, the Pfaffian of the curvature form) is not exact, for otherwise the integral of the curvature form on a closed surface is zero. However, Chern observed that the pullback of the curvature form onto the unit sphere bundle  is exact, and a smooth non-degenerate vector field
is exact, and a smooth non-degenerate vector field  on
on  naturally induces a diffeomorphism from
naturally induces a diffeomorphism from  onto a submanifold
onto a submanifold  in . Here is the open subset of where
in . Here is the open subset of where  . By pulling back the curvature form onto and applying the Stokes theorem, we can localize the curvature integral into a sum of line integrals on small loops around the singularities of , which turn out to give the sum of the index of the vector field. Finally by the Poincare-Hopf theorem, this would give the Euler characteristic of .
. By pulling back the curvature form onto and applying the Stokes theorem, we can localize the curvature integral into a sum of line integrals on small loops around the singularities of , which turn out to give the sum of the index of the vector field. Finally by the Poincare-Hopf theorem, this would give the Euler characteristic of .
While introducing the concept of the unit sphere bundle, I was asked by one of my colleague whether the unit sphere bundle of  is the Hopf fibration. I didn’t know the answer at that time. But then I thought about it again and found that the answer is quite obviously no. However, I found it quite interesting that the Hopf fibration is actually the double cover of
is the Hopf fibration. I didn’t know the answer at that time. But then I thought about it again and found that the answer is quite obviously no. However, I found it quite interesting that the Hopf fibration is actually the double cover of  . I think this is a good exercise in geometry and I am recording it here.
. I think this is a good exercise in geometry and I am recording it here.
For a Riemannian manifold  , the unit sphere bundle is defined to be
, the unit sphere bundle is defined to be

with projection  . This is an
. This is an  -bundle over . In particular, if is two-dimensional, then is a circle bundle.
-bundle over . In particular, if is two-dimensional, then is a circle bundle.
Proposition 1 The circle bundle is diffeomorphic to  . . |
Proof: We regard  is the standard unit sphere, and regard
is the standard unit sphere, and regard  as a column vector. We can define
as a column vector. We can define  by
by
![\displaystyle \begin{array}{rl} \displaystyle \Phi(x, v):=\left[x, v, x\times v\right], \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brl%7D+%5Cdisplaystyle+++%5CPhi%28x%2C+v%29%3A%3D%5Cleft%5Bx%2C+v%2C+x%5Ctimes+v%5Cright%5D%2C+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
where  is the cross product of
is the cross product of  and
and  in
in  . Then
. Then
![\displaystyle \begin{array}{rl} \displaystyle \Phi^{-1}\left(\left[v_1\;v_2\;v_3\right]\right)=(v_1, v_2). \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brl%7D+%5Cdisplaystyle+++%5CPhi%5E%7B-1%7D%5Cleft%28%5Cleft%5Bv_1%5C%3Bv_2%5C%3Bv_3%5Cright%5D%5Cright%29%3D%28v_1%2C+v_2%29.+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
Clearly this is a diffeomorphism. 
In particular,  has fundamental group
has fundamental group  , with
, with  as its double cover (cf. here).
as its double cover (cf. here).
Recall that the Hopf fibration is given by the quotient of the action  on
on  , where the action is given by
, where the action is given by  . It is clear that the quotient space is
. It is clear that the quotient space is  , which is diffeomorphic to . The Hopf fibration is defined to be this quotient:
, which is diffeomorphic to . The Hopf fibration is defined to be this quotient:  .
.
From the above discussion, it is clear that  is not the Hopf fibration. In fact, as
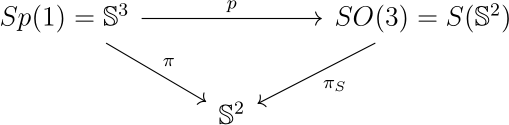
is not the Hopf fibration. In fact, as  is simply connected, it is not diffeomorphic to . However, the Hopf fibration can be regarded as the double cover of , in the sense that this diagram commutes
is simply connected, it is not diffeomorphic to . However, the Hopf fibration can be regarded as the double cover of , in the sense that this diagram commutes
Here  is the double covering map from
is the double covering map from  to . To see this, first identify with the compact symplectic group
to . To see this, first identify with the compact symplectic group  where
where  is the set of quaternions, where
is the set of quaternions, where  . We identify with the space of purely imaginary quaternions
. We identify with the space of purely imaginary quaternions  . Then we define
. Then we define  by
by

It is clear that  . Under this identification, then
. Under this identification, then  as we identify
as we identify  with
with  . Let
. Let  , where
, where  . Suppose
. Suppose  ,
,  . Then by a direct calculation (done by Mathematica here)
. Then by a direct calculation (done by Mathematica here)

On the other hand, for ,  can be defined to be
can be defined to be

Expanding the above, we have

Comparing with (1), we have proved the commutativity.

 is the unit circle centered at
is the unit circle centered at  on the plane and
on the plane and  is a concentric circle with radius
is a concentric circle with radius  (
( ), what is the probability that a random triangle inscribed in
), what is the probability that a random triangle inscribed in  is replaced by a general line segment inside the unit circle.
is replaced by a general line segment inside the unit circle.  and
and  are said to be independent if
are said to be independent if  for all Borel sets
for all Borel sets  . We don’t have a probability measure behind the abstract definition of noncommutative probability space, so we cannot define independence in this way. However, it is not difficult to show that the above definition is equivalent to the following: for any Borel-measurable functions
. We don’t have a probability measure behind the abstract definition of noncommutative probability space, so we cannot define independence in this way. However, it is not difficult to show that the above definition is equivalent to the following: for any Borel-measurable functions  such that
such that  are integrable, one has
are integrable, one has ![\mathbf{E}[f(X)g(Y)] = \mathbf{E}[f(X)] \mathbf{E}[g(Y)]](https://s0.wp.com/latex.php?latex=%5Cmathbf%7BE%7D%5Bf%28X%29g%28Y%29%5D+%3D+%5Cmathbf%7BE%7D%5Bf%28X%29%5D+%5Cmathbf%7BE%7D%5Bg%28Y%29%5D+&bg=ffffff&fg=000000&s=0&c=20201002) . Since we have an expectation in noncommutative context (namely
. Since we have an expectation in noncommutative context (namely  in the
in the  be a noncommutative probability space. Let
be a noncommutative probability space. Let  be two subalgebras such that
be two subalgebras such that  . We say that
. We say that  and
and  are classically independent if
are classically independent if if
if  ,
, and
and  with
with  , then
, then  .
. and
and  , one has
, one has  (by applying the definition to
(by applying the definition to  ). So this is indeed the same as the independence we saw in classical probability.
). So this is indeed the same as the independence we saw in classical probability. , one can define the space of (essentially) bounded random variables
, one can define the space of (essentially) bounded random variables  , and a linear functional
, and a linear functional  on this space, namely the expected value. So we may study the algebra
on this space, namely the expected value. So we may study the algebra  -algebras are more important.
-algebras are more important. , where
, where  is a complex algebra with a unit, and
is a complex algebra with a unit, and  is a linear map such that
is a linear map such that  .
. . To see that this is not a meaningless generalization, we can look at the following examples.
. To see that this is not a meaningless generalization, we can look at the following examples. ,
,  is a noncommutative probability space.
is a noncommutative probability space. with
with  .
. with
with  .
. , fix a unit vector
, fix a unit vector  with
with  and define
and define  . Then
. Then  always denotes the geodesic ball of radius
always denotes the geodesic ball of radius  its boundary, which is called the geodesic sphere. In geodesic polar coordinates, let the area element of
its boundary, which is called the geodesic sphere. In geodesic polar coordinates, let the area element of 
 is the Jacobian (with respect to polar coordinates). For our purpose it is more convenient to regard
is the Jacobian (with respect to polar coordinates). For our purpose it is more convenient to regard  as a one-parameter family of functions in the variable
as a one-parameter family of functions in the variable  satisfies the
satisfies the  )
) 
 is the
is the  is the arc-length parametrized
is the arc-length parametrized  starting from
starting from  along
along  is a
is a 
 is the arclength parameter)
is the arclength parameter) 
 is the
is the  . (Indeed, the differential version
. (Indeed, the differential version  is already true for the geodesic circle.) This implies
is already true for the geodesic circle.) This implies 

 ,
,  , find a line in
, find a line in  represented by
represented by  that fits the data in the following sense. The loss of each data point
that fits the data in the following sense. The loss of each data point  to the line is
to the line is for every
for every  ,
, that minimizes the loss function
that minimizes the loss function![\displaystyle \sum_{i=1}^N [y_i - (mx_i + c)]^2.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Csum_%7Bi%3D1%7D%5EN+%5By_i+-+%28mx_i+%2B+c%29%5D%5E2.&bg=ffffff&fg=333333&s=0&c=20201002)
 . Then the new least squares problem can be formulated as follows.
. Then the new least squares problem can be formulated as follows. where
where  . Thus the distance between
. Thus the distance between  for every
for every  that minimizes the loss function
that minimizes the loss function .
.
 be the
be the  -dimensional
-dimensional 
 .
. and define the
and define the  by
by

 (analogous to the fact that the
(analogous to the fact that the  , is a surface with constant curvature
, is a surface with constant curvature  ). It is easy to see that
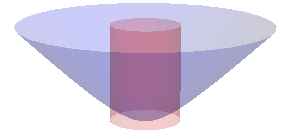
). It is easy to see that ![\displaystyle \begin{array}{rl} \displaystyle X(\theta, \phi)= (r\sinh \theta \cos \phi,r \sinh \theta \sin \phi, r\cosh \theta), \quad \theta\ge 0, \quad \phi\in[0, 2\pi],\end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brl%7D+%5Cdisplaystyle+X%28%5Ctheta%2C+%5Cphi%29%3D+%28r%5Csinh+%5Ctheta+%5Ccos+%5Cphi%2Cr+%5Csinh+%5Ctheta+%5Csin+%5Cphi%2C+r%5Ccosh+%5Ctheta%29%2C+%5Cquad+%5Ctheta%5Cge+0%2C+%5Cquad+%5Cphi%5Cin%5B0%2C+2%5Cpi%5D%2C%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
 , with
, with  being the (geodesic) distance from
being the (geodesic) distance from  .
.

 from
from  to
to 

 )
)
 is exactly the finite cylinder
is exactly the finite cylinder

 , the
, the 

 .
. )
)
 , i.e.
, i.e.  is
is
 . He also showed that the volume of a ball of radius
. He also showed that the volume of a ball of radius  using the
using the  as shown.
as shown.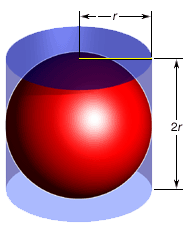
 plane, which then becomes a circle of radius
plane, which then becomes a circle of radius 
 is the “infinitesimal” increment of the angle
is the “infinitesimal” increment of the angle  sign),
sign), 


 ) is (see Fig.
) is (see Fig. 

 .
. , we have
, we have  , which (up to a sign) is the rigorous version of
, which (up to a sign) is the rigorous version of  , where the coefficients are random, what can we say about the distribution of the roots (on
, where the coefficients are random, what can we say about the distribution of the roots (on  )? Of course, it would depend on what “random” means. Here, “random” means that the sequence
)? Of course, it would depend on what “random” means. Here, “random” means that the sequence  is an i.i.d. sequence of complex random variables.
is an i.i.d. sequence of complex random variables. , then as
, then as  , the roots will tend to be distributed on the unit circle! (There are lots of interesting discussions
, the roots will tend to be distributed on the unit circle! (There are lots of interesting discussions  , we have
, we have ,
, is the Lebesgue measure on the complex plane. We will also assume two basic potential theoretic results without proofs, namely
is the Lebesgue measure on the complex plane. We will also assume two basic potential theoretic results without proofs, namely
 , we write
, we write  , the normalized counting measure. We define the expected normalized counting measure,
, the normalized counting measure. We define the expected normalized counting measure, ![\mathbf{E}[Z_{p_n}]](https://s0.wp.com/latex.php?latex=%5Cmathbf%7BE%7D%5BZ_%7Bp_n%7D%5D&bg=ffffff&fg=000000&s=0&c=20201002) , as follows. For any
, as follows. For any  ,
,![\displaystyle \begin{array}{rl} \displaystyle (\mathbf{E}[Z_{p_n}],\psi) &:= \mathbf{E}[(Z_{p_n}, \psi)]\\ &\displaystyle =\frac{1}{\pi^{n+1}}\int_{\mathbb{C}^{n+1}} \frac{1}{n}\sum_{j=1}^n \psi(\zeta_j)e^{-\sum_{j=0}^n |a_j|^2} \,\text{d}m(a_0)\cdots\text{d}m(a_n). \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brl%7D+%5Cdisplaystyle+%28%5Cmathbf%7BE%7D%5BZ_%7Bp_n%7D%5D%2C%5Cpsi%29+%26%3A%3D+%5Cmathbf%7BE%7D%5B%28Z_%7Bp_n%7D%2C+%5Cpsi%29%5D%5C%5C%C2%A0+%26%5Cdisplaystyle+%3D%5Cfrac%7B1%7D%7B%5Cpi%5E%7Bn%2B1%7D%7D%5Cint_%7B%5Cmathbb%7BC%7D%5E%7Bn%2B1%7D%7D+%5Cfrac%7B1%7D%7Bn%7D%5Csum_%7Bj%3D1%7D%5En+%5Cpsi%28%5Czeta_j%29e%5E%7B-%5Csum_%7Bj%3D0%7D%5En+%7Ca_j%7C%5E2%7D+%5C%2C%5Ctext%7Bd%7Dm%28a_0%29%5Ccdots%5Ctext%7Bd%7Dm%28a_n%29.+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
 are distributed “on average”.
are distributed “on average”.![\displaystyle \lim_{n\to\infty} \mathbf{E}[Z_{p_n}] = \frac{1}{2\pi}\text{d}\theta](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Clim_%7Bn%5Cto%5Cinfty%7D+%5Cmathbf%7BE%7D%5BZ_%7Bp_n%7D%5D+%3D+%5Cfrac%7B1%7D%7B2%5Cpi%7D%5Ctext%7Bd%7D%5Ctheta+&bg=ffffff&fg=000000&s=0&c=20201002)

 is a solution to
is a solution to  (usually denoted by “
(usually denoted by “ ”, but indeed there is no single-valued square root for complex numbers, or even negative real numbers).
”, but indeed there is no single-valued square root for complex numbers, or even negative real numbers). and
and  :
: 
 in the first expansion and comparing with the remaining two, it’s easy to see that
in the first expansion and comparing with the remaining two, it’s easy to see that 



 with the point
with the point  on the plane. We can write a complex number in its polar form
on the plane. We can write a complex number in its polar form  , which is identified with
, which is identified with  in polar coordinates. We call
in polar coordinates. We call  and
and  the
the  respectively.
respectively.
 and
and  is then
is then 
 is the product of the two moduli and the argument of
is the product of the two moduli and the argument of  and compute
and compute 
 . We will argue that its length is
. We will argue that its length is  and its argument is
and its argument is 

 . Then
. Then  and so
and so 
![\displaystyle \begin{array}{rl} \displaystyle |({z_n})^n| =|z_n|^n =\left(1+\frac{x^2}{n^2}\right)^{\frac{n}{2}} =& \displaystyle \left[\left(1+\frac{x^2}{n^2}\right)^{n^2}\right]^{\frac{1}{2n}}\\ \rightarrow& \displaystyle \left(e^{x^2}\right)^{0}=1 \ \ \ \ \ (3)\end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brl%7D+%5Cdisplaystyle+++%7C%28%7Bz_n%7D%29%5En%7C+%3D%7Cz_n%7C%5En+%3D%5Cleft%281%2B%5Cfrac%7Bx%5E2%7D%7Bn%5E2%7D%5Cright%29%5E%7B%5Cfrac%7Bn%7D%7B2%7D%7D+%3D%26+%5Cdisplaystyle+%5Cleft%5B%5Cleft%281%2B%5Cfrac%7Bx%5E2%7D%7Bn%5E2%7D%5Cright%29%5E%7Bn%5E2%7D%5Cright%5D%5E%7B%5Cfrac%7B1%7D%7B2n%7D%7D%5C%5C+%5Crightarrow%26+%5Cdisplaystyle+%5Cleft%28e%5E%7Bx%5E2%7D%5Cright%29%5E%7B0%7D%3D1++%5C+%5C+%5C+%5C+%5C+%283%29%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
 . On the other hand, the argument of
. On the other hand, the argument of  (which is well-defined up to a multiple of
(which is well-defined up to a multiple of  ) can be chosen to be
) can be chosen to be 

![\displaystyle \begin{array}{rl} \displaystyle \lim_{n\rightarrow \infty} \arg [(z_n)^n ]= \lim_{n\rightarrow \infty} n\arg(z_n)= \lim_{n\rightarrow \infty} n\theta_n=x. \ \ \ \ \ (4)\end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brl%7D+%5Cdisplaystyle++%5Clim_%7Bn%5Crightarrow+%5Cinfty%7D+%5Carg+%5B%28z_n%29%5En+%5D%3D+%5Clim_%7Bn%5Crightarrow+%5Cinfty%7D+n%5Carg%28z_n%29%3D+%5Clim_%7Bn%5Crightarrow+%5Cinfty%7D+n%5Ctheta_n%3Dx.+%5C+%5C+%5C+%5C+%5C+%284%29%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)

 (but without giving the full mathematical details) in the above approach:
(but without giving the full mathematical details) in the above approach: function
function  on
on  such that
such that ![{[c_1,c_2]\subset f(\mathbb R^2)}](https://s0.wp.com/latex.php?latex=%7B%5Bc_1%2Cc_2%5D%5Csubset+f%28%5Cmathbb+R%5E2%29%7D&bg=ffffff&fg=000000&s=0&c=20201002) and
and ![{f^{-1}([c_1,c_2])}](https://s0.wp.com/latex.php?latex=%7Bf%5E%7B-1%7D%28%5Bc_1%2Cc_2%5D%29%7D&bg=ffffff&fg=000000&s=0&c=20201002) is compact, we have
is compact, we have 
 .
.
 is compactly supported, then
is compactly supported, then 
